Tutorial -Motors and Drives
DC Motors
Generally speaking, one first thinks of DC motors when it comes to servo feedback systems. This is because DC motors can be controlled to rotate in either direction and their drives, whether the control signal is analog or digital, are relatively simple. They also come in a wide variety of sizes ranging from the small "instrumentation" motors to the large industrial motors capable of driving robots. They can be driven either by controlling their speed (voltage) or torque (current). At the risk of oversimplification, DC motors can be classified in several ways:
Technology
- Series wound
- Shunt wound
- Permanent magnet
- Alnico (iron based)
- Ferrite (ceramic)
- Rare-earth
Commutation technique
- Brush
- Brushless
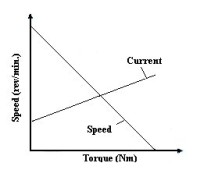
Different technologies have different torque-speed characteristics as shown in the curves in Figure 1. Series-wound motor torque-speed curves are usually concave up and have high stall torques. In contrast, shunt wound motors have torque-speed curves which are concave down with lower stall torques. Permanent magnet motors generally have much more linear curves then either of the wound types. From these general characteristics it follows that series wound motors tend to be stronger, but shunt wound motors tend to be self-regulating in that they automatically maintain a higher speed as the torque increases.
 Torque-speed characteristics of the permanent magnet motor tend to have a much larger linear characteristic than the wound motors. This is a significant theoretical advantage and makes control much easier. However, they are limited to a few horsepower and, therefore, are used in motion instrumentation products more than in manufacturing. Alnico magnets are fairly strong, but they will become demagnetized if used in a stalled operation. In contrast, ferrite magnets maintain their magnetization better but are generally weaker. The newer, so-called rare-earth magnets combine the best of both worlds, but of course at a price. Even so, they are the up and comers of the industry.
Torque-speed characteristics of the permanent magnet motor tend to have a much larger linear characteristic than the wound motors. This is a significant theoretical advantage and makes control much easier. However, they are limited to a few horsepower and, therefore, are used in motion instrumentation products more than in manufacturing. Alnico magnets are fairly strong, but they will become demagnetized if used in a stalled operation. In contrast, ferrite magnets maintain their magnetization better but are generally weaker. The newer, so-called rare-earth magnets combine the best of both worlds, but of course at a price. Even so, they are the up and comers of the industry.
In a traditional DC brush motor, the commutator and brushes supply current to the armature while allowing the rotor to rotate. However, the brushes create the major weakness of DC motors in that physical contact causes wear and tear, unwanted debris and degradation of performance. This leads to the very popular idea of the DC brushless motor in which the commutation is done electronically rather than through physical contact. The technique works beautifully and the motor world has been predicting the demise of the brush motor for some time now. Even so, it shouldn't come as any surprise that the less expensive traditional brush motor is still the most popular.
DC motors possess the following advantages:
- High starting torque;
- Speed control over a wide range, both below and above the normal speed; and
- Quick starting, stopping, reversing and accelerating.
AC Motors
 By far and away, the most common source of electric rotary power is the AC induction motor. It is more reliable and less expensive than its DC counterpart. However, since the speed depends on the line frequency rather than voltage, this motor is used mostly for constant speed, non-controlled applications. Therefore, for motion control, we choose to ignore the rich variety of specific technologies used in AC motors and concentrate on the basics. A simple classification scheme is as follows:
By far and away, the most common source of electric rotary power is the AC induction motor. It is more reliable and less expensive than its DC counterpart. However, since the speed depends on the line frequency rather than voltage, this motor is used mostly for constant speed, non-controlled applications. Therefore, for motion control, we choose to ignore the rich variety of specific technologies used in AC motors and concentrate on the basics. A simple classification scheme is as follows:
- Induction
- Single phase
- Three phase
- Servo Synchronous Universal
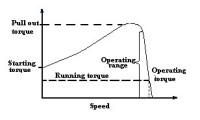
Since the speed of an induction motor varies with the frequency, the torque-speed curve is considerably different than that for a DC motor. As can be seen in Figure 2, there is a significant torque for a large range of speeds before the motor actually starts. In the operating region above the pull-out torque the induction motor has excellent voltage regulation in that large changes in torque result in only small changes in speed. Thus, in the operating region, the induction motor is an excellent tool for constant speed applications.
Induction motors are grouped according to the type of power they use. Three-phase motors are more powerful and are simpler than their single-phase counterparts, but can only be used where three phase power is available. This is usually in industrial environments.
One special case of the two-phase induction motor is the AC servo motor. It is a high torque motor with an almost linear torque-speed characteristic. However, unlike the DC servo motor in which the speed is controlled by the voltage, the AC servo's speed is controlled by the frequency. Therefore, an AC servo drive must convert ordinary 60 Hz AC voltage to DC and back to AC again to a variable frequency making for a more complicated unit.
There is one other especially useful AC actuator, the synchronous motor. Unlike the induction motor whose operation is based on the "slip" or difference between the stator and rotor frequencies, the synchronous motor has no slip and its speed is exactly proportional to the line frequency. This allows for a number of motors, all coming off the same power line, to operate at exactly the same speed. Applications such as conveyors and assembly lines can use these devices most effectively since even when there are deviations, all units will still be coordinated.
Finally we come to the universal motor. This motor is actually a join between both the AC and DC worlds since it can run on either type of power. It has a commutator, brushes and a torque-speed characteristic similar to DC wound motors.
Stepper Motors
The duty cycle of a motor describes the energization.
Stepper motors are a motion engineer's solution to the open loop problem. There are many applications such as disk access and printing which require point-to-point movement of a small load in a known time. If the motion is non-critical, stepper motors can be a wonderful solution since they simply do as they are told but leave no receipt of whether the task was successfully completed or not. They can be accurate, fast, and inexpensive and can handle small light loads effectively.
As with other actuators, stepper motors require special drives. In this case the drive is actually a sequencer that pulses the motor through a succession of steps from one position to another. Good steppers can even take fractional steps (micro stepping) so that their positional accuracy at a given time is discrete, but none-the-less good. The major problem with stepper motors is efficiency. Even when it is not moving, the stepper must be continually energized in order to prevent unwanted motion.
Stepper motor technologies include permanent magnet, variable reluctance and hybrid. Hybrids are more complicated internally, but from a user's view, all three technologies work the same. Thus for the most part, hybrid combines the best of both the permanent magnet and variable reluctance worlds and is the major type in use today.